UGOKU One ユーザーガイド
概要
UGOKU One は、モータやセンサを使ったロボットなどのDIY作品を、より手軽に製作・操作できるように開発された、オープンソースハードウェアの汎用基板です。
- 単四電池ボックス搭載で単四電池4本でDCモータやRCサーボの駆動が可能
- Arduinoで開発可能なESP32マイコン搭載(無線通信対応)
- DCモータドライバ(TB67H450FNG)を2個搭載
- 豊富な汎用IOポートでいろんな拡張が可能
- 圧着工具を使用せずにモータやセンサの配線が可能
回路図 (PDF) | ハードウェアリポジトリ (KiCadファイル)
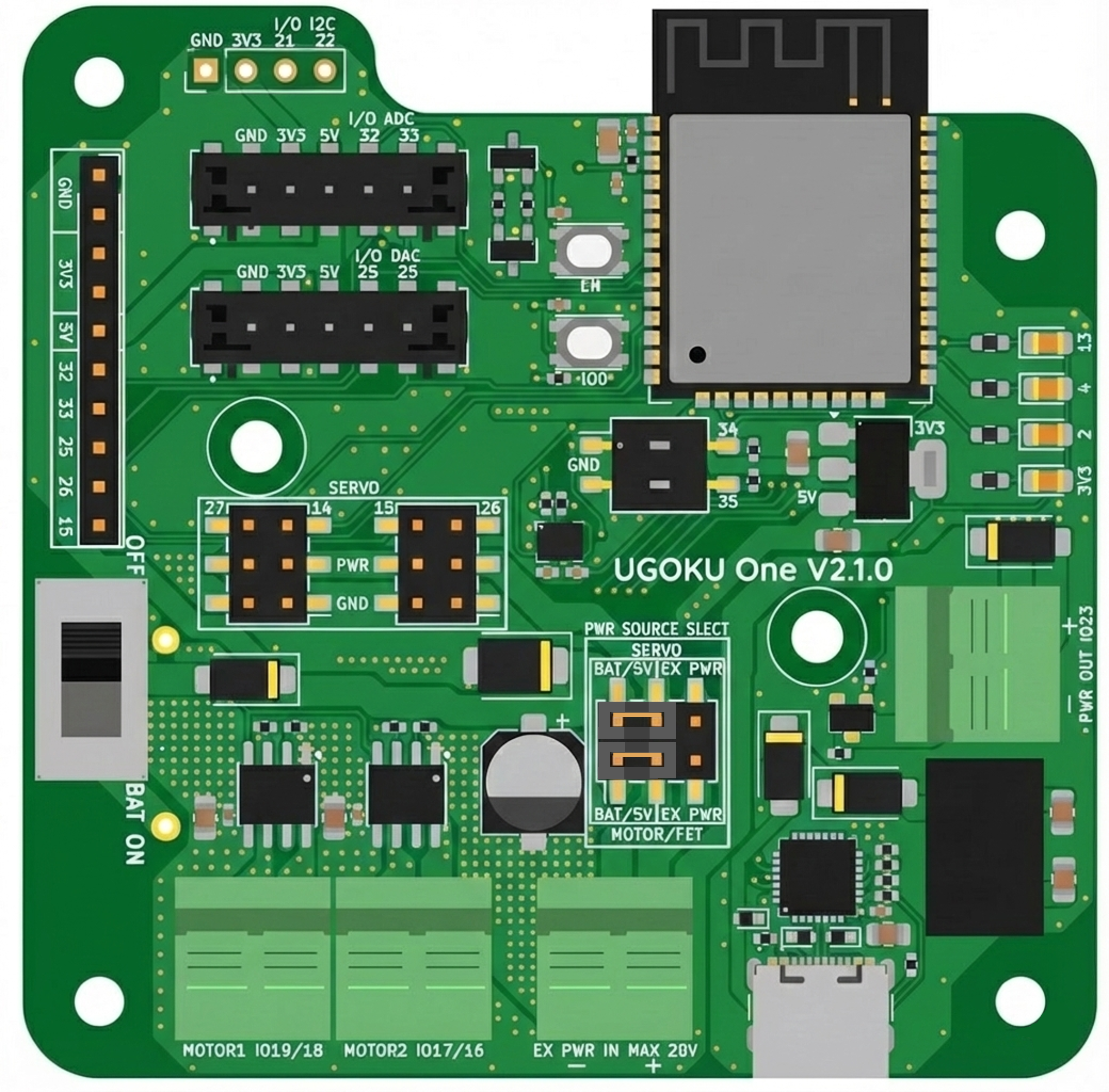
ピン番号の表記について 基板上の各ポート、スイッチ、LED、汎用IOコネクタに記載の数字は、ESP32のGPIO番号に対応しています。プログラム作成時はこの番号を指定してください。
スタートガイド (UGOKU Pad でDCモータとサーボモータを操作する)
電源と配線の接続
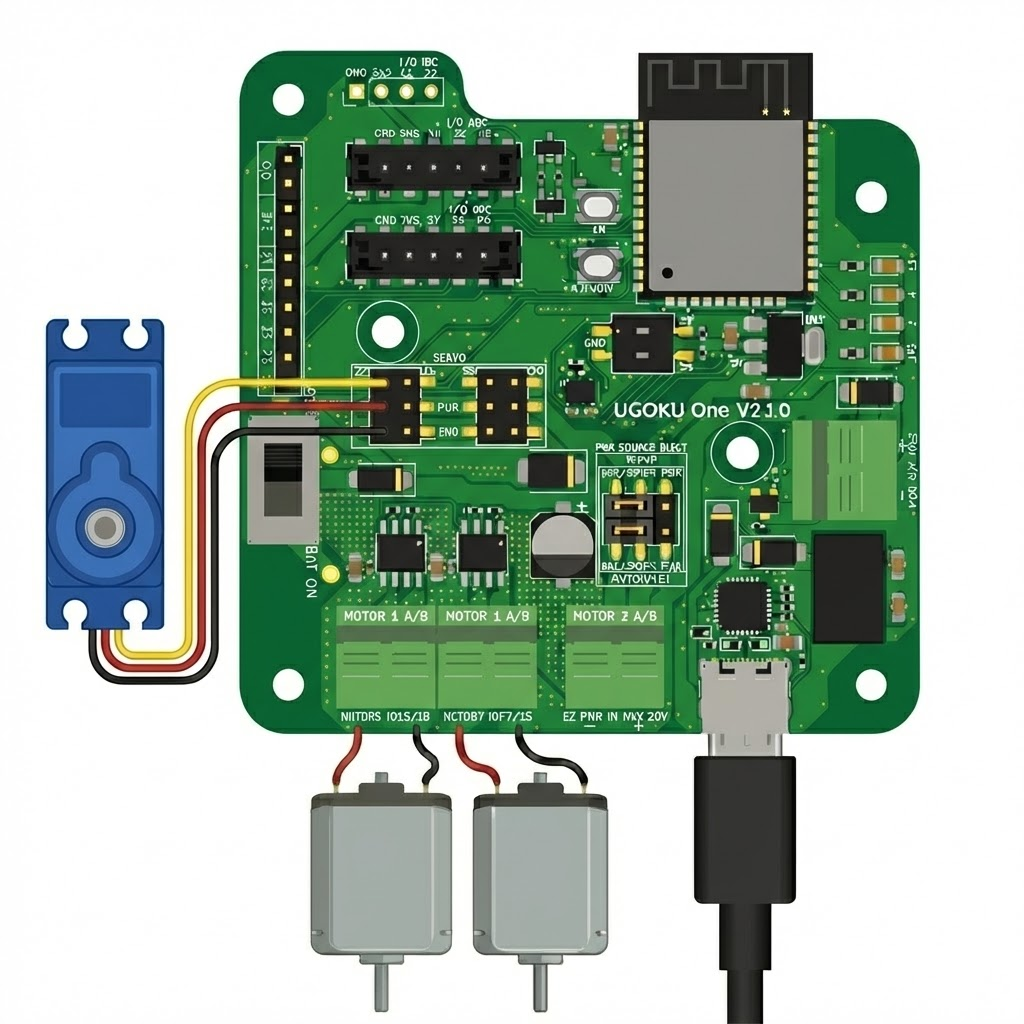
アクチュエータの接続
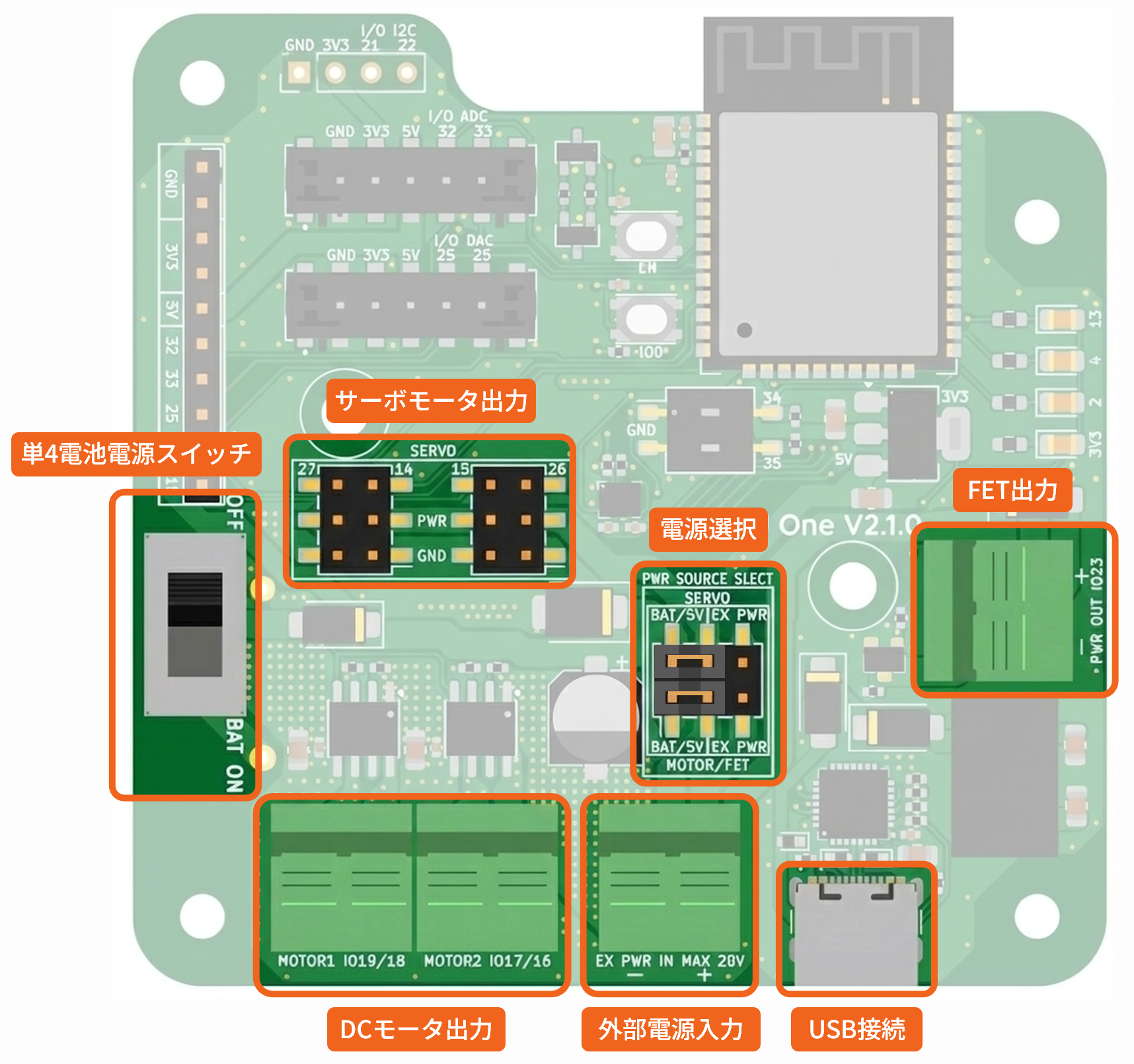
サーボモータはピンヘッダへ、DCモータはプッシュイン端子台へ接続します。(サンプルプログラムでは、GPIO 27と14のサーボを制御します)
電源について
電源は、裏面の単4電池ボックスまたはUSB接続が利用可能です。
外部の電源を利用したい場合は、電源入力とアクチュエータ出力をご確認ください。
プッシュイン端子台の接続方法
DCモータや外部電源を接続する際は、以下の手順でプッシュイン端子台に配線してください。
- 電線の被膜を8mm程度剥きます
- 端子台の押しボタンを爪で押し下げます
- ボタンを押したまま、剥いた電線を奥まで差し込みます
- ボタンを離すと、電線が固定されます
サンプルプログラムの書き込み
準備するもの
- UGOKU One 本体
- Arduino IDEをインストールしたPC (インストールはこちら)
- USB Type-C ケーブル
- サンプルプログラムをダウンロード (ZIP) | リポジトリを見る
ESP32ボードのインストール
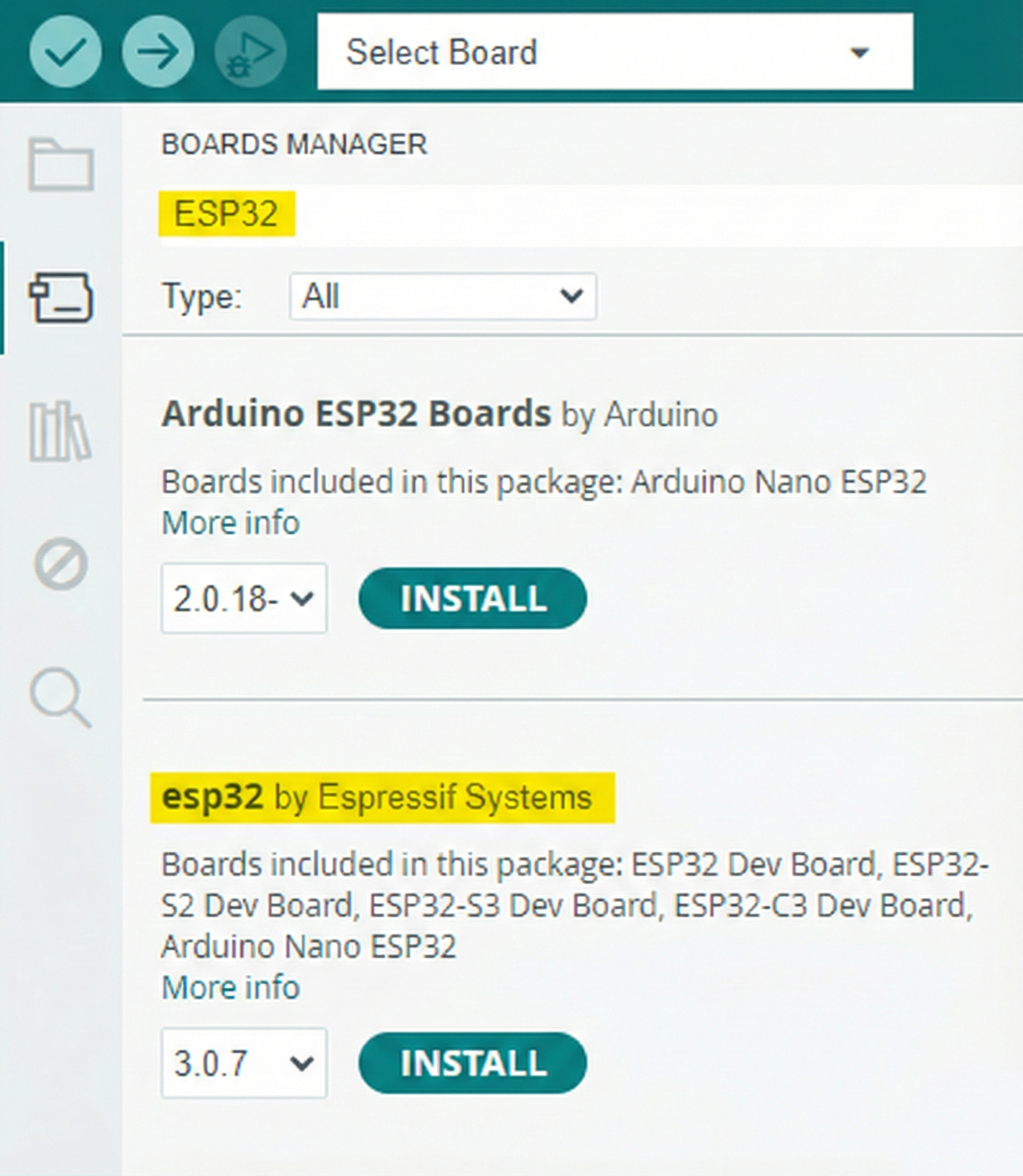
Arduino IDEの BOARD MANAGER で ESP32 をインストールします。
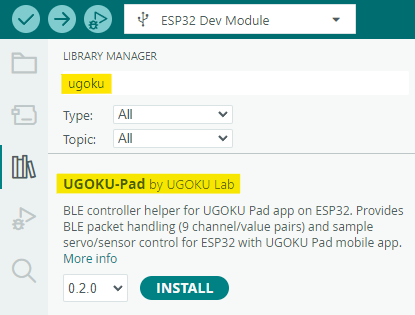
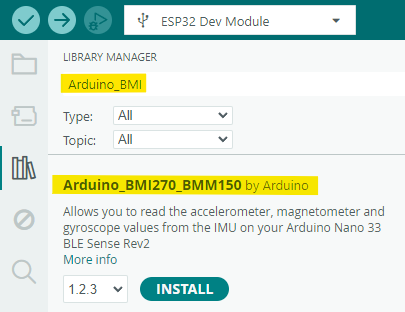
ライブラリのインストール
LIBRARY MANAGER で以下の2つをインストールします。
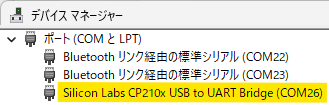
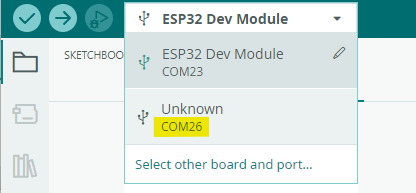
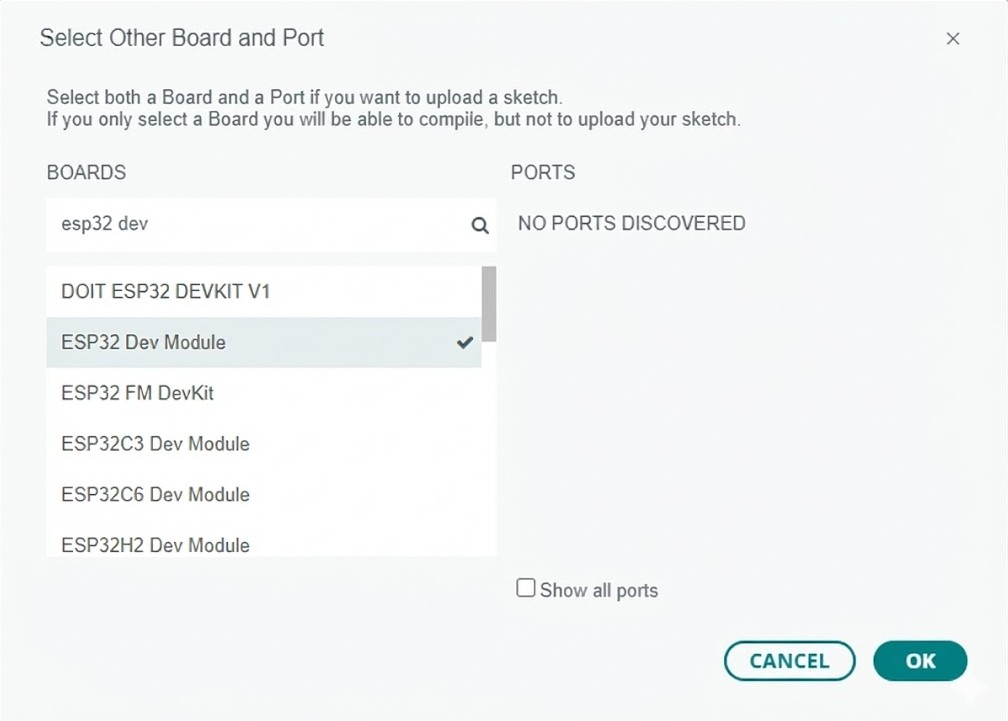
書き込み設定
UGOKU OneをPCに接続し、以下の設定を行います。
書き込み実行
サンプルプログラムを開いた上で、IDE左上の「→」ボタンをクリックし、書き込みを開始します。
下部のメッセージエリアに「ボードへの書き込みが完了しました」と表示されれば成功です。
UGOKU Padの準備と操作
アプリのインストール
AndroidまたはiOS端末にUGOKU Pad
をインストールしてください。
アプリの操作と接続
アプリを起動し、UGOKU One と接続してください(右図参照)。
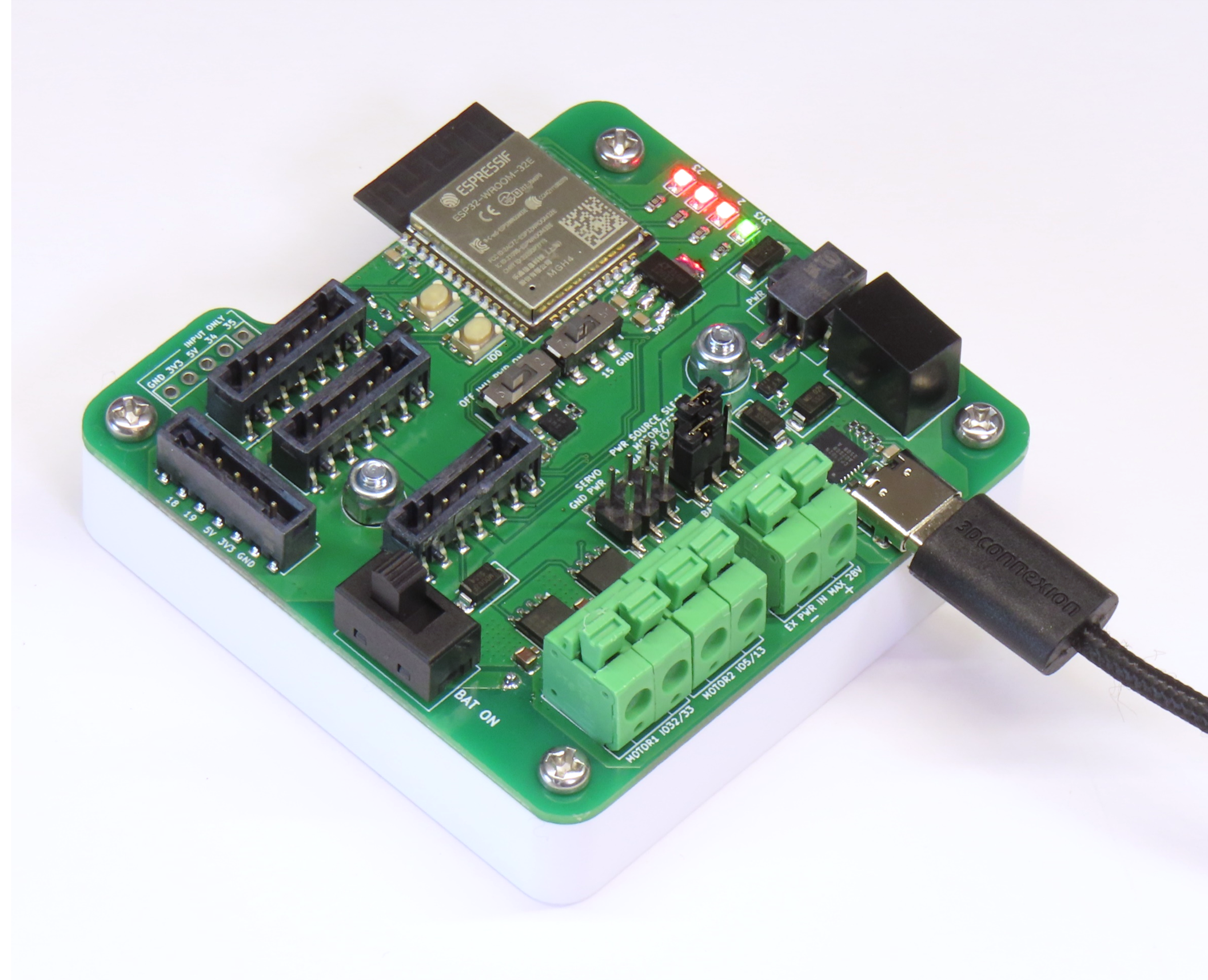
電源入力とアクチュエータ出力
電源仕様の概要
- 電源入力は、単4電池、USB接続、外部電源入力 の3系統に対応しています
- 単4電池とUSB給電は、それぞれダイオードを介して5V系統に接続されます
- 外部電源入力はDC-DCコンバータとダイオードを介して5V系統に接続されています
- 単4電池は、単4電池電源スイッチでオン/オフが可能です
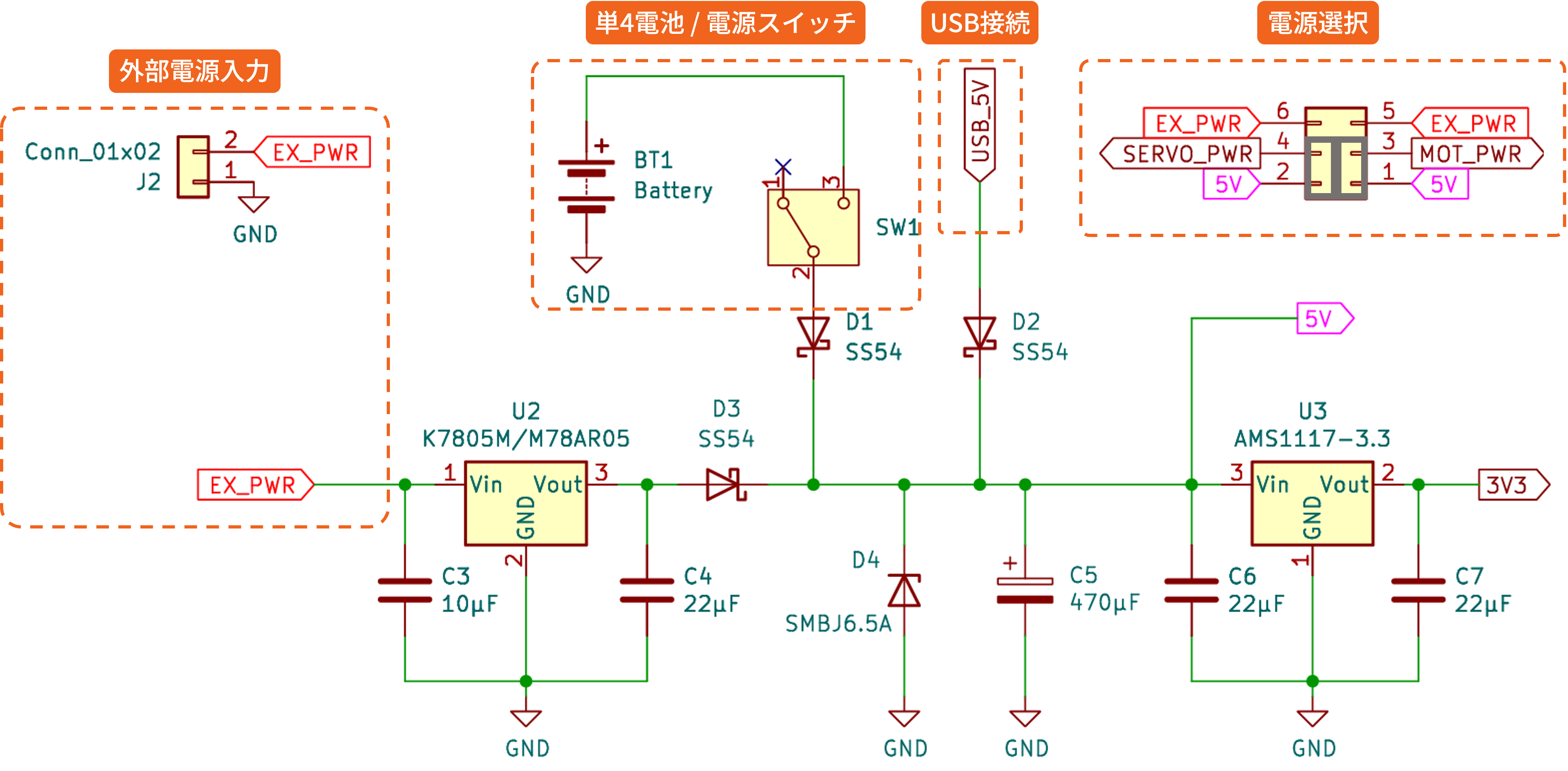
電源選択

ジャンパピンの設定により、アクチュエータ(モータ等)の駆動電源を選択できます。
- アクチュエータに供給する電力は5V系統と外部電源入力の2つから選択できます
- サーボモータ出力とDCモータ/FET出力に供給する系統をそれぞれ独立して選択が可能です
- アクチュエータを単4電池を含む5V系統で駆動する場合はジャンパを左側に挿します
- 外部電源入力の電力で直接駆動する場合はジャンパを右側に挿します
電源入力
単4電池

単4電池は4本直列で使用します。ニッケル水素電池(eneloopなど)を使用した場合、約2A程度の出力が可能です。
USB接続
USB接続は5V電源を供給します。PC(USB 3.x)からの給電は 0.9A までとなります。
外部電源入力
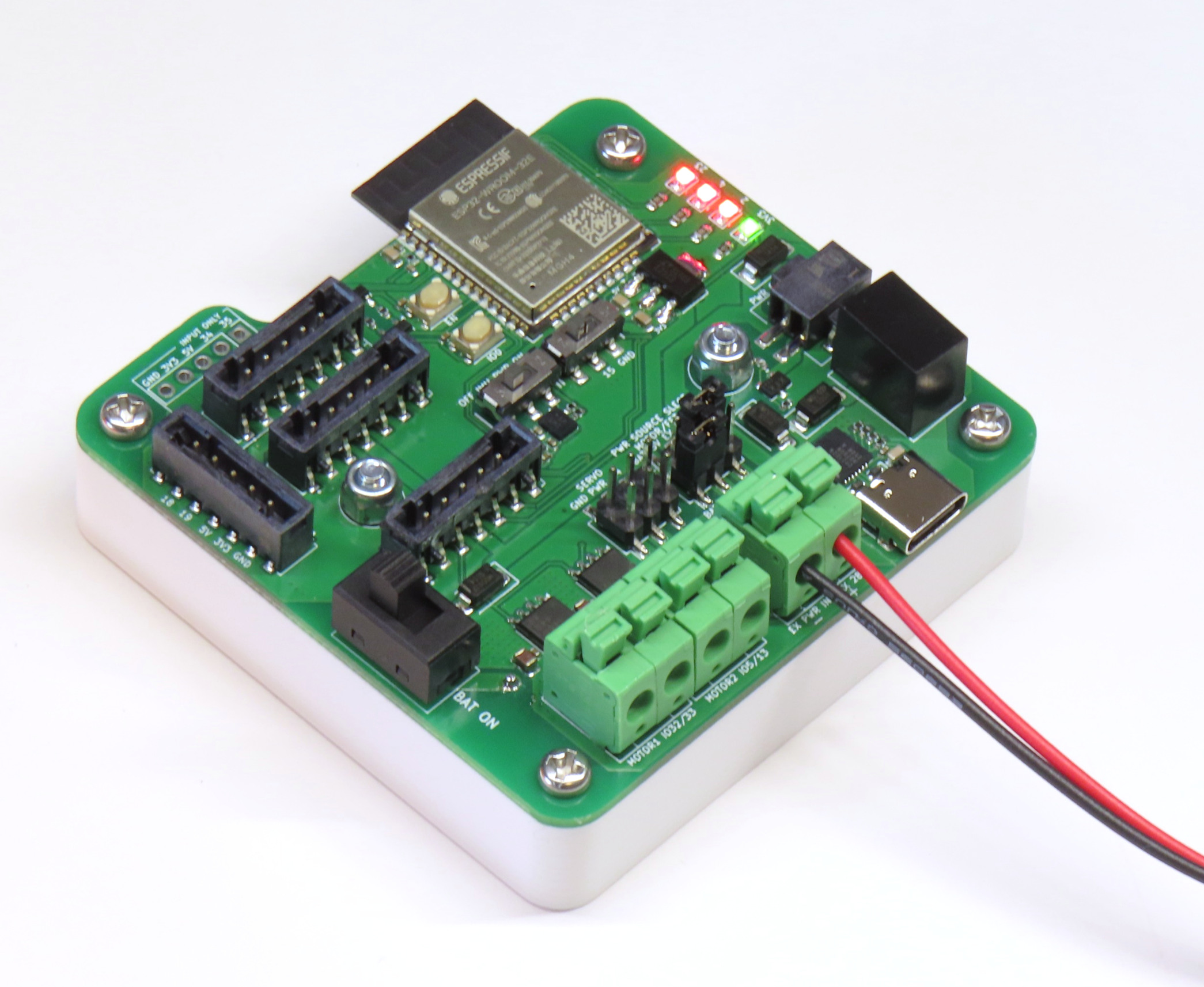
外部電源入力は7〜26Vの直流電源を接続できます。2ピン端子台に接続します。
アクチュエータ出力
サーボモータ出力
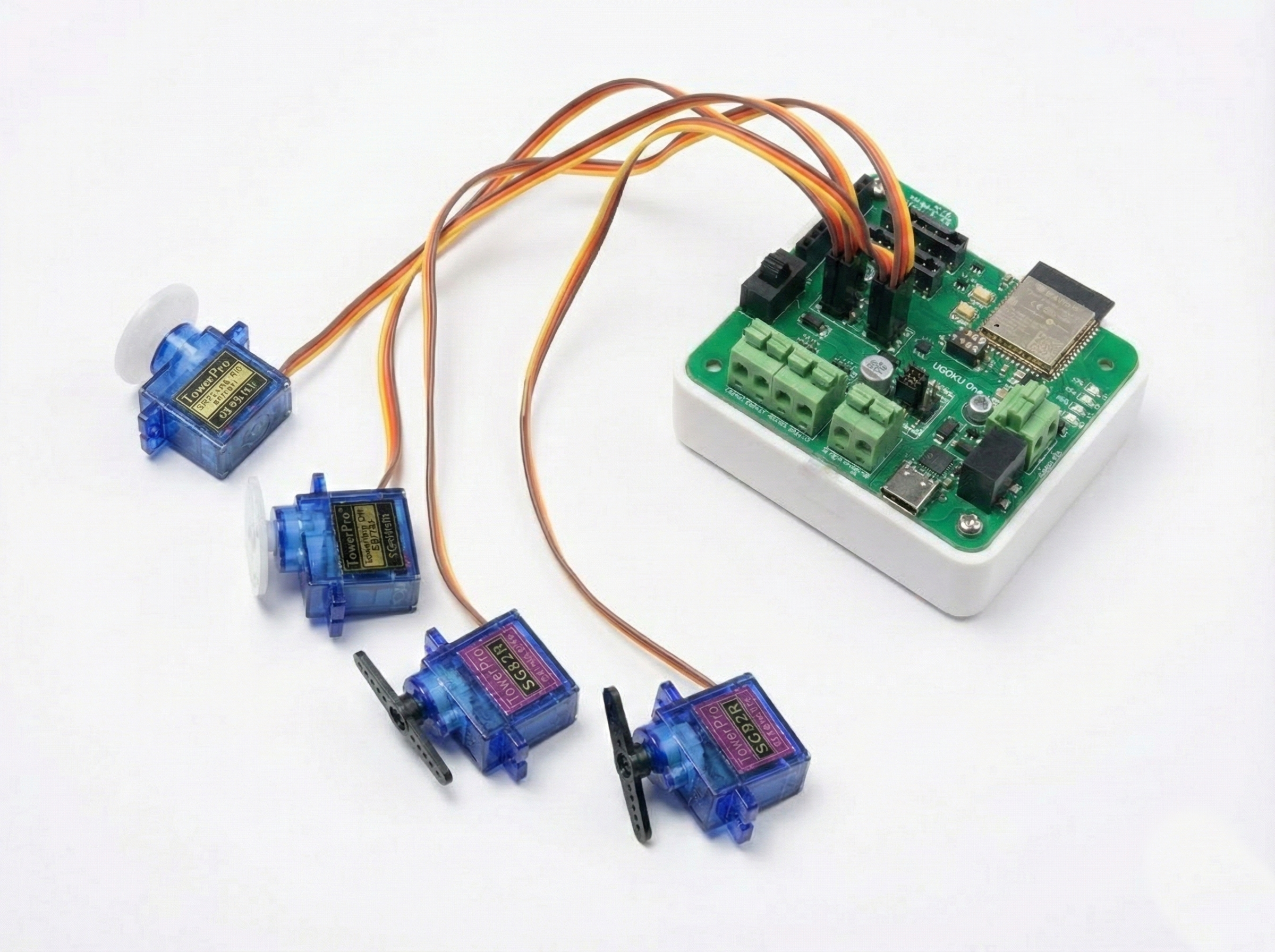
サーボモータ用の電源出力端子です。
最大4つのサーボモータを接続できます。
15ピンと26ピンは汎用I/Oポートと共有になっているので、一緒に使わないでください。
DCモータ出力
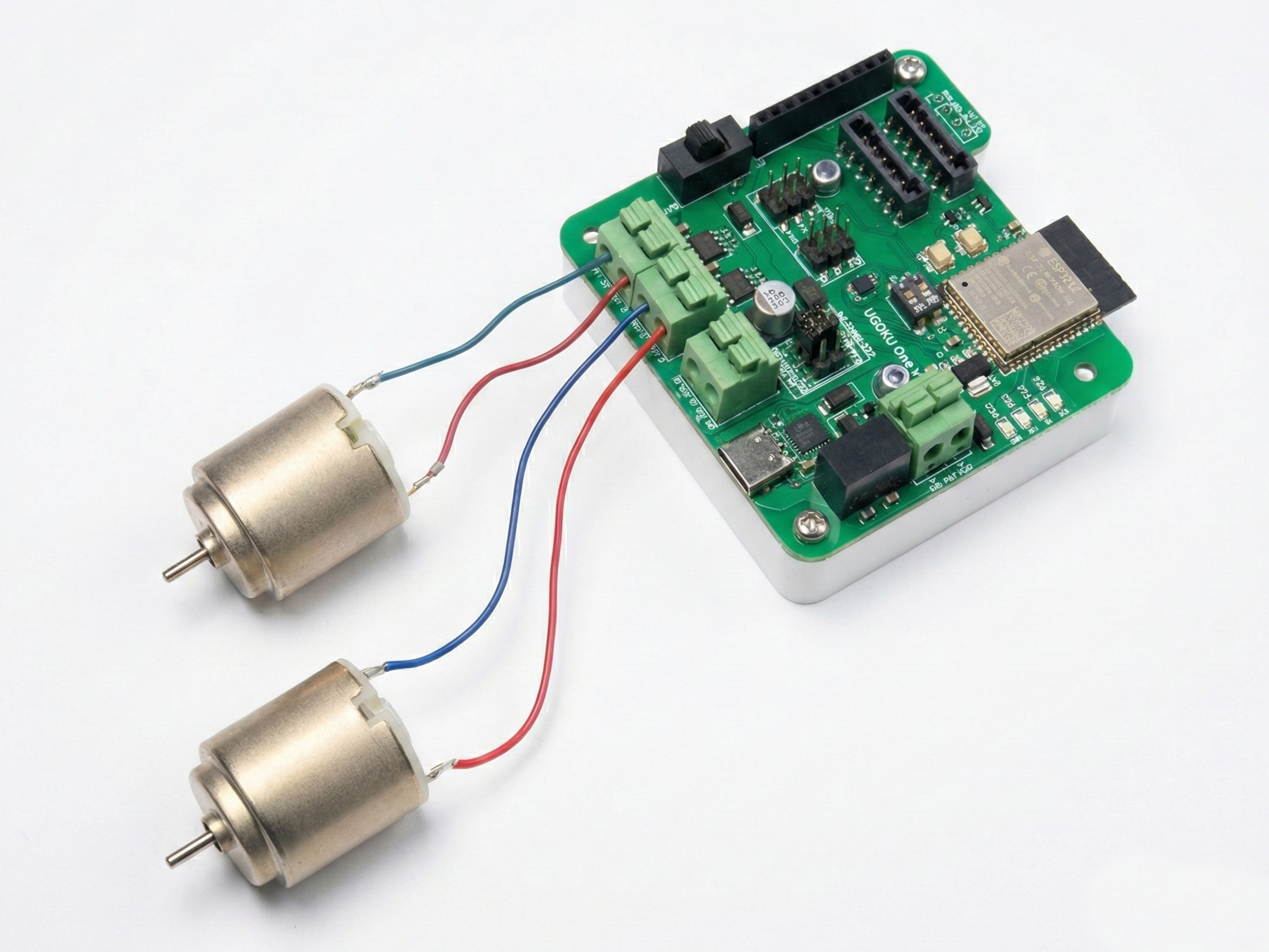
モータドライブIC TB67H450FNG を2個搭載しています。
260クラス程度のモータを使ったロボットなどを動作させるのに必要な性能を備えています。
定格出力(実際の出力は使用する電源の能力に依存します)
| 項目 | 2個同時使用時 | 1個のみ使用時 |
|---|---|---|
| 電圧 | 4.5 ~ 26V | |
| 連続電流 | 1.3 A | 1.5 A |
| 短時間電流 (90s*1) | 1.5 A | — |
| 短時間電流 (5s*1) | 2.0 A | 2.0 A |
| 瞬時最大電流 | 3.5 A (モータドライバIC最大絶対定格) | |
*1 時間はテスト結果より安全マージンを取った値です
PWR OUT(FET出力)
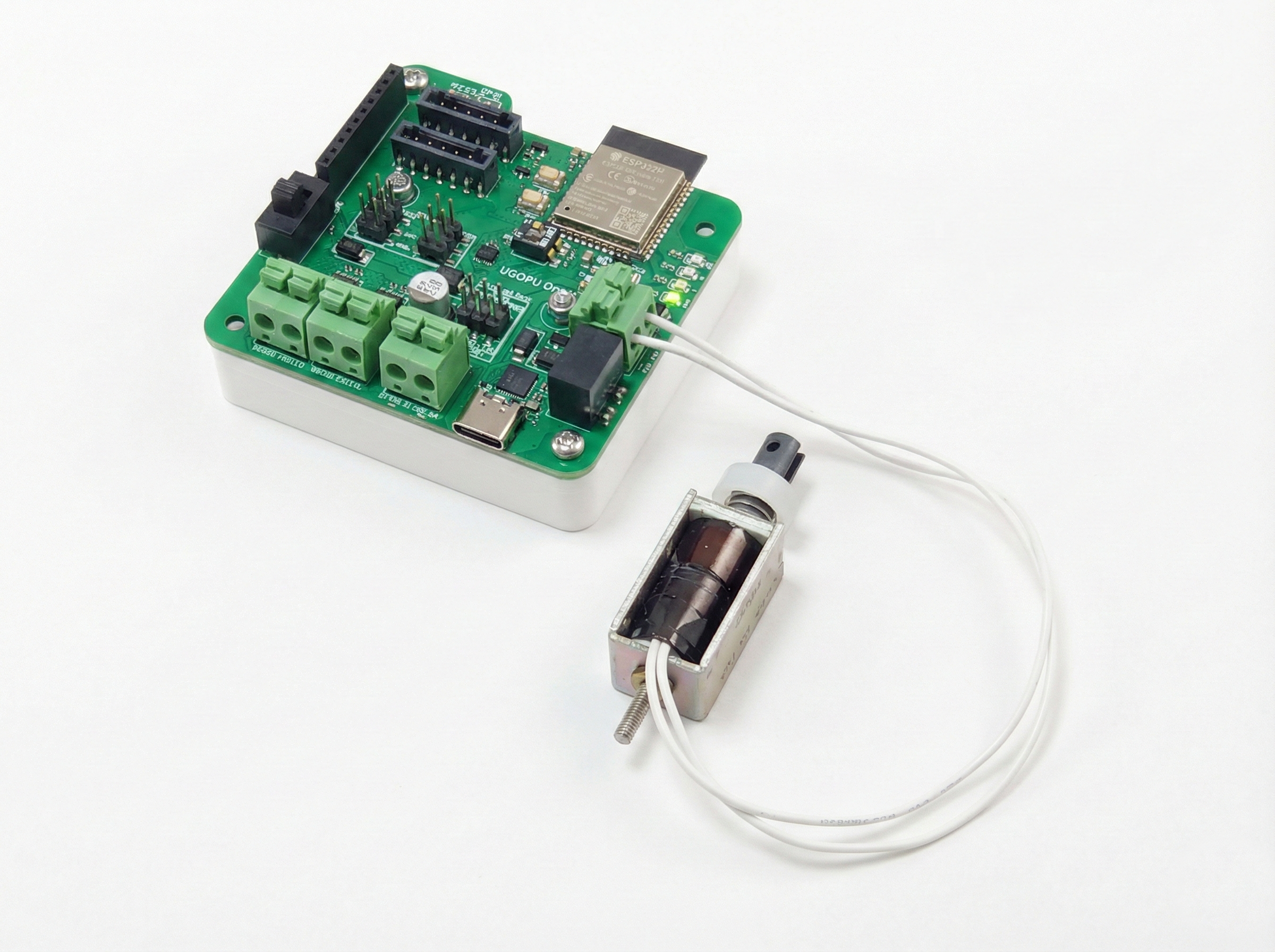
Nch MOSFET (SSM3K333R) によるローサイド出力(マイナス側のスイッチング)です。
比較的大電力を必要とする電源のオンオフ制御に使用できます。
出力には極性(+/-)がありますので注意してください。
定格出力(実際の出力は使用する電源の能力に依存します)
| 項目 | 仕様 |
|---|---|
| 電圧 | 4.5 ~ 26V |
| 連続電流 | 3.0 A |
| 短時間電流 (90s*1) | 5.0 A |
*1 時間はテスト結果より安全マージンを取った値です
汎用IOとスイッチ
汎用IOと接続方法
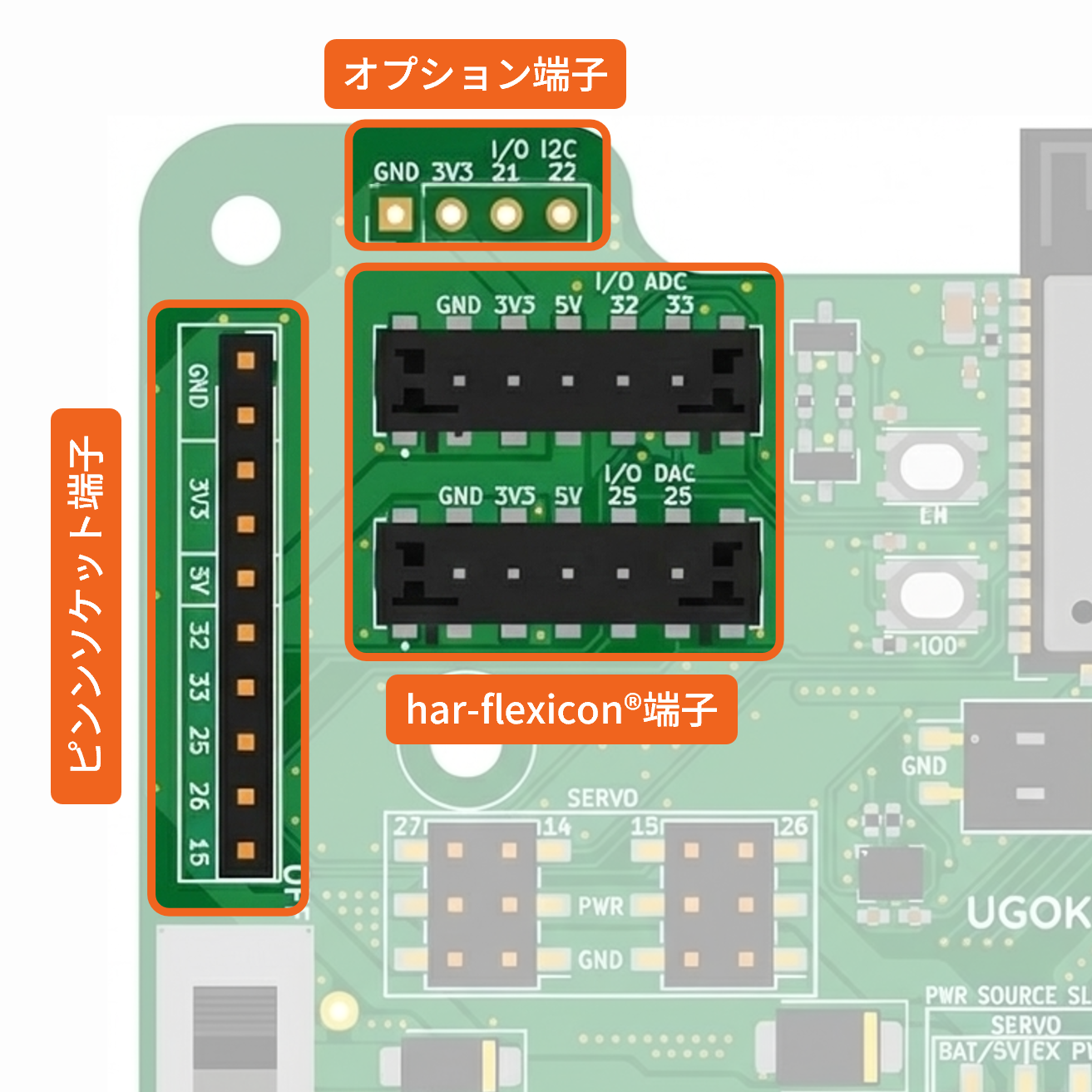
センサやモジュールの追加に利用できる拡張端子です。
- オプション端子: ピンヘッダやXHコネクタなどのコネクタを実装できます。I2Cが利用可能です。
- ピンソケット(左): ジャンパ線での拡張に便利
- har-flexicon®(右): はんだ付け不要で接続可能
※注意: ピン15、26は「ピンソケット」「har-flexicon®」「サーボ出力」で信号を共有しているため、同時に使用できません。また、ピン25は「ピンソケット」と「har-flexicon®」で共有されています。
har-flexicon®の配線方法
はんだ不要で配線できる HARTING社製 har-flexicon® コネクタ を採用しています。ケーブル側のコネクタは 1つ UGOKU One に付属しています。追加で使用したい場合は、こちら などからご購入いただけます。
仕様: AWG 26〜20 / 剥き長さ 6mm
- 電線の被膜を6mm剥きます。
- 動画のように、四角い穴に電線を奥まで差し込みます。
- 外す際は、上部のスリットに細い工具を差し込み、内部のバネを押し込みます。
※細めのより線など柔らかい電線は挿入しにくい場合があります。その場合はAWG 20に近い太めの電線を使用してください。
リセットスイッチとユーザースイッチ
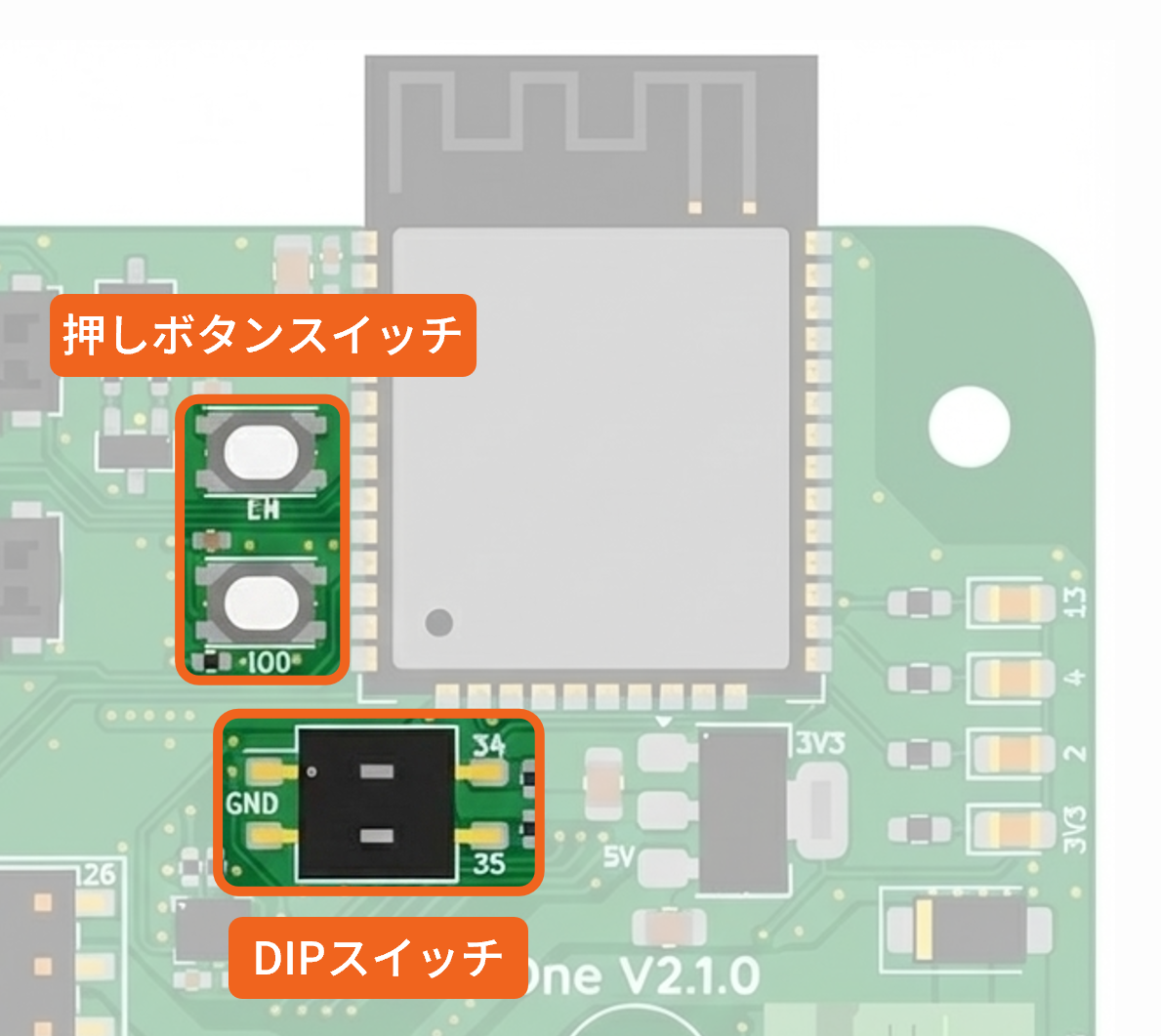
押しボタン
ESP32 Dev Module互換の構成です。
- EN (上): リセットスイッチ
- IO0 (下): ユーザースイッチ
DIPスイッチ
ピン34, 35 に接続されています。これらも汎用のユーザースイッチとして利用可能です。
サンプルプログラムでは、モータの回転方向の切り替え(ユーザースイッチ機能)に使用しています。
スイッチの仕様: 各スイッチはプルアップされています。そのため、スイッチONで LOW (0)、OFFで HIGH (1) となります(負論理)。
IMU (慣性計測ユニット)
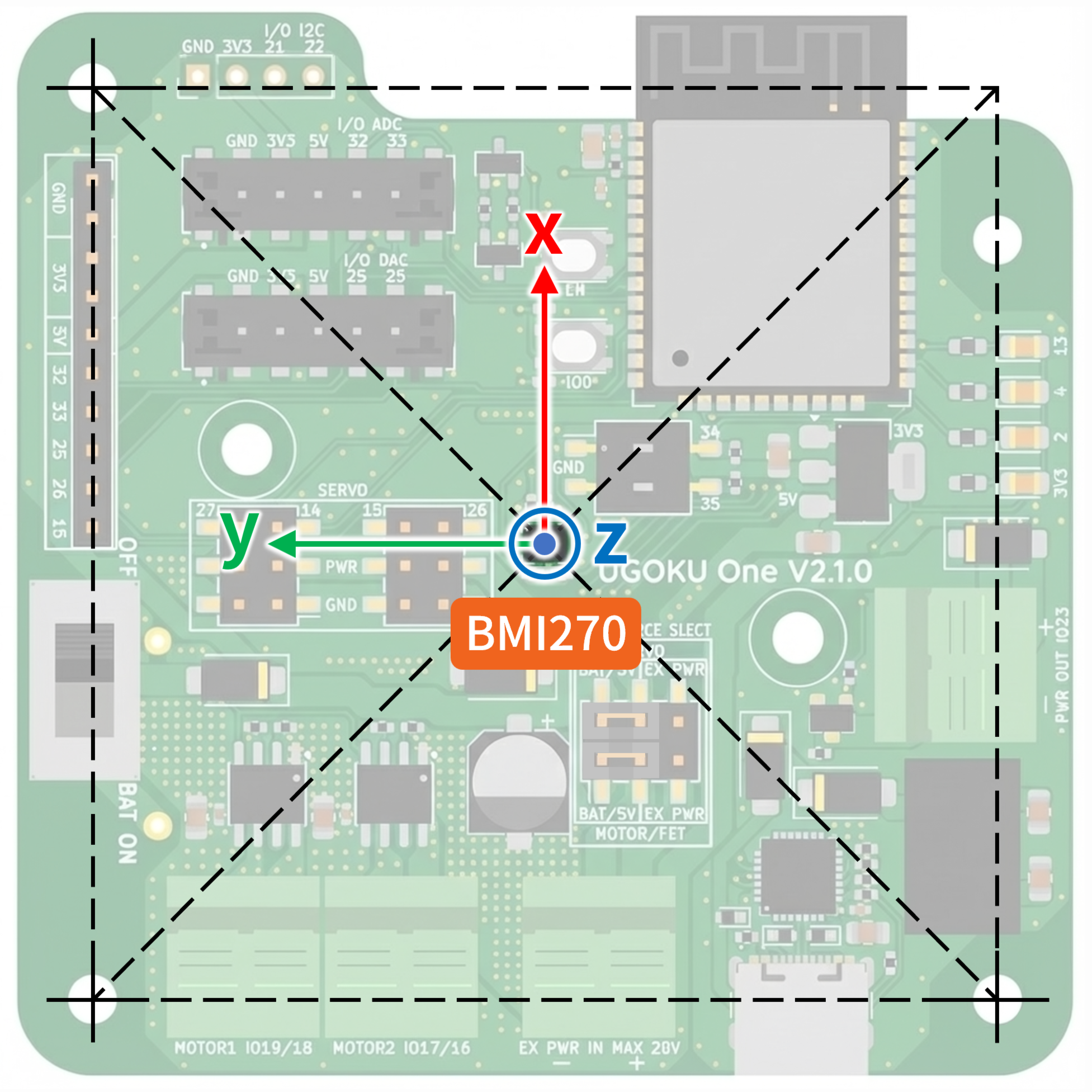
基板の中央に、Bosch Sensortec社の6軸IMU (3軸加速度計 + 3軸ジャイロスコープ) BMI270 を搭載しています。サンプルプログラムでは、UGOKU PadでXYZ軸の加速度の値を確認できます。
接続仕様
| 通信方式 | I2C |
|---|---|
| SCL | GPIO 22 (10kΩプルアップ抵抗あり) |
| SDA | GPIO 21 (10kΩプルアップ抵抗あり) |
| 割り込み1 (INT1) | GPIO 36 (SENSOR_VP) |
| 割り込み2 (INT2) | GPIO 39 (SENSOR_VN) |